本文最后更新于:2020年8月17日 凌晨
文章对常用的数据结构做归纳总结。
写在前面
- 时间和空间的转换,两者之间平衡的意识;
- 掌握常用的基础数据结构,包括内部实现、常用操作的时间和空间复杂度;
- 针对不同的场景,能够选择较为合适的数据结构;
常用数据结构
数组
用一组连续的内存空间,存储一组具有相同类型的数据;
支持随机访问,但插入、删除操作比较低效;
操作
随机访问
一维寻址公式:a[k]_address = base_address + k * type_size;
二维寻址公式,对于 m*n 的数组:a[i][j]_address = base_address + (i*n+j) * type_size;
所以,根据下标随机访问的时间复杂度为 O(1);
插入操作
- 开头插入:最坏时间复杂度是O(n);
- 平均情况时间复杂度: (1+2+…n)/n = O(n);
- 在中间第 k 位插入:时间复杂度可以达到是O(1);
- 如果数组中的数据是有序的,在某个位置插入一个新的元素时,就必须搬移 k 之后的数据,但是,
- 如果数组中存储的数据没有任何规律,数组只是被当作一个存储数据的集合。这种情况下,如果要将某个数据插入到第 k 个位置,为了避免大规模的数据搬移,还有一个简单的办法,直接将第 k 位的数据搬移到数组元素的最后,把新的元素直接放入第 k 个位置;
- 在末尾插入:时间复杂度是O(1);
删除操作
- 开头删除:最坏时间复杂度O(n);
- 平均情况时间复杂度O(n);
- 在中间第 k 位删除:每次删除操作只记录数据已被删除。当没有更多空间时,才触发执行真正的删除操作;
- 在某些特殊场景下,并不一定要求数组中数据的连续性。如果将多次删除操作集中在一起执行,删除的效率会有所提高;
- JVM 的标记清除垃圾回收算法的核心思想应用了这个思想;
- 在末尾删除:时间复杂度O(1);
应用
平时的业务开发,使用编程语言提供的容器类比较方便,有助于提高开发效率;
底层的开发适合直接使用数组,更加高效;
链表
- 通过指针将一组零散的内存块串联起来使用;
- 插入、删除数据快;
单链表
查找
根据指针一个节点一个节点依次遍历,直到找到目标节点。
插入和删除
只要考虑相邻节点的指针改变,时间复杂度是O(1)。
循环链表
一种特殊的单链表,尾节点指针指向链表的头节点。
双向链表
支持两个方向,后继指针 next 指向后面的节点,前驱指针 pre 指向前面的节点;
查找、插入、删除的效率都比单链表高;
删除“值等于给定值”的节点
从头节点开始遍历,依次对比,直到找到值等于给定值的节点,通过指针操作将其删除;
时间复杂度为O(n);
删除给定指针指向的节点
- 对于单链表,已经知道了要删除的节点,但是要删除某个结点 q 需要知道其前驱结点,而单链表不可以直接获取前驱结点,所以为了找到前驱结点,要从头结点开始遍历链表,直到 p->next=q,说明 p 是 q 的前驱结点。时间复杂度为O(n);
- 对于双向链表,因为节点已经保存了前驱结点的指针,不需要像单链表那样遍历。所以,O(1) 的时间复杂度就可以完成操作;
应用
链表适合插入、删除操作比较频繁的场景;
双向链表比单链表的插入、删除等操作简单、高效,适用在很多场景;
循环链表适合要处理的数据具有环形结构的特点,比如约瑟夫环问题;
栈
一种操作受限的线性表,只允许在一端插入和删除数据,特点是FILO。
实现
只需要一个栈顶指针;
用数组实现的栈叫顺序栈,用链表实现的栈叫链式栈;
顺序栈
/**
* 基于数组实现的顺序栈
*
*/
public class ArrayStack {
private String[] items; // 数组
private int count; // 栈中元素个数
private int n; // 栈的大小
// 初始化数组,申请一个大小为n的数组空间
public ArrayStack(int n) {
this.items = new String[n];
this.n = n;
this.count = 0;
}
// 入栈操作
public boolean push(String item) {
// 数组空间不够了,直接返回false,入栈失败。
if (count == n) return false;
// 将item放到下标为count的位置,并且count加一
items[count] = item;
++count;
return true;
}
// 出栈操作
public String pop() {
// 栈为空,则直接返回null
if (count == 0) return null;
// 返回下标为count-1的数组元素,并且栈中元素个数count减一
String tmp = items[count-1];
--count;
return tmp;
}
}链式栈
/**
* 基于链表实现的链式栈
* 注意:通俗的理解,节点的next指针是指向“底下”的节点,是指向下面的节点
*/
public class StackBasedOnLinkedList {
private Node top = null;
public void push(int value) {
Node newNode = new Node(value, null);
// 判断是否栈空
if (top == null) {
top = newNode;
} else {
newNode.next = top;
top = newNode;
}
}
/**
* 这里用-1表示栈中没有数据。
*/
public int pop() {
if (top == null) return -1;
int value = top.data;
top = top.next;
return value;
}
public void printAll() {
// 用一个临时变量
Node p = top;
while (p != null) {
System.out.print(p.data + " ");
p = p.next;
}
System.out.println();
}
private static class Node {
private int data;
private Node next;
public Node(int data, Node next) {
this.data = data;
this.next = next;
}
public int getData() {
return data;
}
}
}操作
- 不管是顺序栈还是链式栈,存储数据只需要一个大小为 n 的数组。在入栈和出栈过程中,只需要一两个临时变量存储空间,所以空间复杂度是 O(1);
- 注:这里存储数据需要一个大小为 n 的数组,并不是说空间复杂度就是 O(n)。因为这 n 个空间是必须的,无法省掉。所以空间复杂度,是指除了原本的数据存储空间外,算法运行还需要额外的存储空间;
- 顺序栈还是链式栈,入栈、出栈只涉及栈顶个别数据的操作,所以时间复杂度都是 O(1);
动态扩容的栈
尽管链式栈的大小不受限,但要存储 next 指针,内存消耗相对较多。
实现
底层依赖一个支持动态扩容的数组;
栈满之后,要申请一个更大的数组,将原来的数据搬移到新的数组中;
入栈
最好情况时间复杂度是O(1);
最坏情况时间复杂度是O(n);
均摊时间复杂度是O(1);
出栈
时间复杂度是O(1)。
应用
函数调用栈
作为一个比较基础的数据结构,应用场景较多。一个比较经典的应用场景就是函数调用栈。栈可以用于在函数调用时保存临时变量,为什么函数调用要用“栈”来保存临时变量呢?用其他数据结构不行吗?
- 其实,不一定非要用栈来保存临时变量,只不过函数调用符合后进先出的特性,用栈这种数据结构来实现,是最顺理成章的选择;
- 从调用函数进入被调用函数,对于数据来说,变化的是什么呢?是作用域。所以根本上,只要能保证每进入一个新的函数,都是一个新的作用域就可以。而要实现这个,用栈就非常方便。在进入被调用函数的时候,分配一段栈空间给这个函数的变量,在函数结束的时候,将栈顶复位,正好回到调用函数的作用域内;
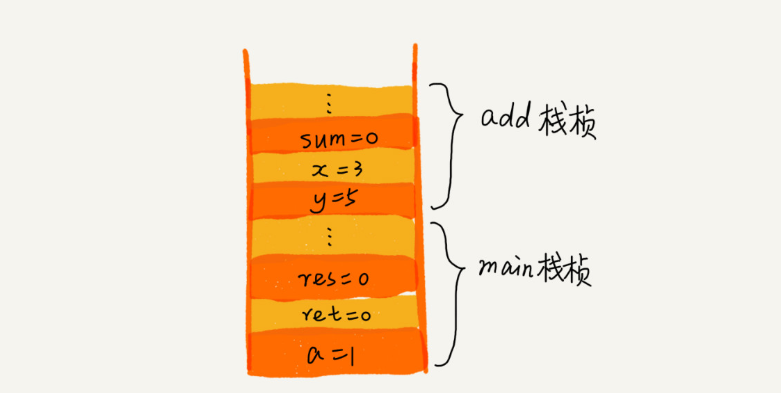
操作系统给每个线程分配了一块独立的内存空间,这块内存被组织成“栈”这种结构,用来存储函数调用时的临时变量。每进入一个函数,就会将临时变量作为一个栈帧入栈,当被调用函数执行完成,返回之后,将这个函数对应的栈帧出栈。
int main() {
int a = 1;
int ret = 0;
int res = 0;
ret = add(3, 5);
res = a + ret;
printf("%d", res);
reuturn 0;
}
int add(int x, int y) {
int sum = 0;
sum = x + y;
return sum;
}
表达式求值
算术表达式只包含加减乘除四则运算。一个保存操作数的栈,另一个是保存运算符的栈。
- 从左向右遍历表达式,当遇到数字,就直接压入操作数栈;
- 当遇到运算符,就与运算符栈的栈顶元素进行比较,
- 如果比运算符栈顶元素的优先级高,就将当前运算符压栈;
- 如果比运算符栈顶元素的优先级低或者相同,从运算符栈中取栈顶运算符,从操作数栈的栈顶取 2 个操作数,然后进行计算,再把计算完的结果压入操作数栈,继续比较;
括号匹配
表达式中只包含三种括号,圆括号 ()、方括号[]和花括号{},可以任意嵌套。给定一个包含三种括号的表达式字符串。用栈可以解决检查它的合法性。
- 用栈来保存未匹配的左括号,从左到右依次扫描字符串。当扫描到左括号时,则将其压入栈中;
- 当扫描到右括号时,从栈顶取出一个左括号,
- 如果能够匹配,比如“(”跟“)”匹配,“[”跟“]”匹配,“{”跟“}”匹配,则继续扫描剩下的字符串;
- 如果扫描的过程中,遇到不能配对的右括号,或者栈中没有数据,则说明为非法格式;
- 当所有的括号都扫描完成之后,如果栈为空,则说明字符串为合法格式;否则,说明有未匹配的左括号,为非法格式;
实现浏览器的前进、后退功能
使用两个栈,X 和 Y,把首次浏览的页面依次压入栈 X,
- 当点击后退按钮时,再依次从栈 X 中出栈,并将出栈的数据依次放入栈 Y;
- 当点击前进按钮时,依次从栈 Y 中取出数据,放入栈 X 中;
- 当栈 X 中没有数据时,就说明没有页面可以继续后退浏览了;当栈 Y 中没有数据,那就说明没有页面可以点击前进按钮浏览了;
队列
一种操作受限的线性表数据结构,特性是FIFO。
实现
需要两个指针,head指针指向队头,tail指针指向队尾。
顺序队列
用数组实现的队列;
出队时不用搬移数据。如果没有空闲空间,只需要在入队时再集中触发一次数据的搬移操作;
队满的判断条件是 tail == n,队空的判断条件是 head == tail。
/**
* 基于数组实现的队列
*
*/
public class ArrayQueue {
// 数组:items,数组大小:n
private String[] items;
private int n = 0;
// head表示队头下标,tail表示队尾下标
private int head = 0;
private int tail = 0;
// 申请一个大小为capacity的数组
public ArrayQueue(int capacity) {
items = new String[capacity];
n = capacity;
}
// 入队
public boolean enqueue(String item) {
// 如果tail == n 表示队列已经满了
if (tail == n) return false;
items[tail] = item;
++tail;
return true;
}
// 出队
public String dequeue() {
// 如果head == tail 表示队列为空
if (head == tail) return null;
// 为了让其他语言的同学看的更加明确,把--操作放到单独一行来写了
String ret = items[head];
++head;
return ret;
}
}以上的不停地入队、出队操作,head 和 tail 都会持续往后移动。当 tail 移动到最右边,即使数组中还有空闲空间,也无法继续往队列中添加数据了。
一个可能的解决方案:在出队时可以不用搬移数据。如果没有空闲空间,只需要在入队时,再集中触发一次数据的搬移操作。借助这个思想,出队函数 dequeue() 保持不变,改造一下入队函数 enqueue() 的实现,就可以解决刚才的问题。
// 入队操作,将item放入队尾
public boolean enqueue(String item) {
// tail == n表示队列末尾没有空间了
if (tail == n) {
// tail ==n && head==0,表示整个队列都占满了
if (head == 0) return false;
// 数据搬移
for (int i = head; i < tail; ++i) {
items[i-head] = items[i];
}
// 搬移完之后重新更新head和tail
tail -= head;
head = 0;
}
items[tail] = item;
++tail;
return true;
}链式队列
用链表实现的队列。基于链表的实现,需要两个指针:
- head 指针指向链表的第一个结点;
- tail 指针指向最后一个结点;
- 入队时:tail->next= new_node, tail = tail->next;
- 出队时:head = head->next;
/**
* 基于链表实现的队列
*
*/
public class QueueBasedOnLinkedList {
// 队列的队首和队尾
private Node head = null;
private Node tail = null;
// 入队
public void enqueue(String value) {
if (tail == null) {
Node newNode = new Node(value, null);
head = newNode;
tail = newNode;
} else {
tail.next = new Node(value, null);
tail = tail.next;
}
}
// 出队
public String dequeue() {
if (head == null) return null;
String value = head.data;
head = head.next;
if (head == null) {
tail = null;
}
return value;
}
public void printAll() {
Node p = head;
while (p != null) {
System.out.print(p.data + " ");
p = p.next;
}
System.out.println();
}
private static class Node {
private String data;
private Node next;
public Node(String data, Node next) {
this.data = data;
this.next = next;
}
public String getData() {
return data;
}
}
}循环队列
用数组来实现队列的时候,在 tail==n 时,会有数据搬移操作,这样入队操作性能就会受到影响。可以使用逻辑上数组首尾相连成环的循环队列解决这个问题。
实现
确定好队空和队满的判定条件:
- 队空:head == tail;
- 队满:(tail + 1) % n == head;
/**
* 基于数组实现的循环队列
*
*/
public class CircularQueue {
// 数组:items,数组大小:n
private String[] items;
private int n = 0;
// head表示队头下标,tail表示队尾下标
private int head = 0;
private int tail = 0;
// 申请一个大小为capacity的数组
public CircularQueue(int capacity) {
items = new String[capacity];
n = capacity;
}
// 入队
public boolean enqueue(String item) {
// 队列满了
if ((tail + 1) % n == head) return false;
items[tail] = item;
tail = (tail + 1) % n;
return true;
}
// 出队
public String dequeue() {
// 如果head == tail 表示队列为空
if (head == tail) return null;
String ret = items[head];
head = (head + 1) % n;
return ret;
}
}缺点
队列满时,tail指向的位置没有存储数据,所以循环队列会浪费一个数组的存储空间。
阻塞队列
在队列的基础上增加了阻塞操作;
队列为空时,从队头取数据会被阻塞;
并发队列
线程安全的队列。
实现
方式一:直接在enqueue()、dequeue() 上加锁,锁粒度大并发度会比较低下,同一时刻仅允许一个存取数操作。
方式二:利用 CAS 原子操作,可以实现非常高效的并发队列。
应用
- 平时的业务很少直接用到队列;
- 一些具有特殊特性的队列应用比较广泛,比如循环队列、阻塞队列和并发队列;
- 循环队列比链式队列应用更加广泛;
- 高性能队列 Disruptor、Linux环形缓存,都用到了循环并发队列;
- Java concurrent 并发包利用 ArrayBlockingQueue 来实现公平锁等;
二叉树
每个节点最多有两个子节点,即左子节点和右子节点。
相关概念
节点高度 = 节点到叶子节点的最长路径(边数);
节点深度 = 根节点到这个节点所经历的边的个数;
节点层数 = 节点深度 + 1;
树的高度 = 根节点的高度;
分类
满二叉树:叶子节点全都在最底层,除叶子节点之外,每个节点都有左右两个子节点;
完全二叉树:叶子节点都在最底下两层,而且最后一层的叶子节点都靠左排列;
二叉查找树:最大的特点是支持动态数据集合的快速插入、删除、查找操作。树中的任意一个节点,
- 其左子树中的每个节点的值,都要小于这个节点的值;
- 其右子树中的每个节点的值,都要大于这个节点的值;
二叉查找树
BST查找操作
public class BinarySearchTree {
private Node tree;
public Node find(int data) {
Node p = tree;
while (p != null) {
if (data < p.data) p = p.left;
else if (data > p.data) p = p.right;
else return p;
}
return null;
}
public static class Node {
private int data;
private Node left;
private Node right;
public Node(int data) {
this.data = data;
}
}
}BST的插入操作
二叉查找树的插入过程有点类似查找操作。新插入的数据一般都是在叶子节点上,所以只需要从根节点开始,依次比较要插入的数据和节点的大小关系。
- 如果要插入的数据比节点的数据大:
- 并且节点的右子树为空,就将新数据直接插到右子节点的位置;
- 如果不为空,就递归遍历右子树,查找插入位置;
- 如果要插入的数据比节点数值小:
- 并且节点的左子树为空,就将新数据直接插到左子节点的位置;
- 如果不为空,就递归遍历左子树,查找插入位置;
public void insert(int data) {
if (tree == null) {
tree = new Node(data);
return;
}
Node p = tree;
while (p != null) {
if (data > p.data) {
if (p.right == null) {
p.right = new Node(data);
return;
}
p = p.right;
} else { // data < p.data
if (p.left == null) {
p.left = new Node(data);
return;
}
p = p.left;
}
}
}BST的删除操作
BST的删除操作相对复杂,针对要删除节点的子节点个数的不同,需要分三种情况来处理。
- 如果要删除的节点没有子节点,只需要直接将父节点中,指向要删除节点的指针置为 null。
- 如果要删除的节点只有一个子节点(只有左子节点或者右子节点),只需要更新父节点中,指向要删除节点的指针,让它指向要删除节点的子节点就可以了。
- 如果要删除的节点有两个子节点。那么需要找到这个节点的右子树中的最小节点,把它替换到要删除的节点上。然后再删除掉这个最小节点,因为最小节点肯定没有左子节点。
public void delete(int data) {
Node p = tree; // p指向要删除的节点,初始化指向根节点
Node pp = null; // pp记录的是p的父节点
while (p != null && p.data != data) {
pp = p;
if (data > p.data) p = p.right;
else p = p.left;
}
if (p == null) return; // 没有找到
// 要删除的节点有两个子节点
if (p.left != null && p.right != null) { // 查找右子树中最小节点
Node minP = p.right;
Node minPP = p; // minPP表示minP的父节点
while (minP.left != null) {
minPP = minP;
minP = minP.left;
}
p.data = minP.data; // 将minP的数据替换到p中
p = minP; // 下面就变成了删除minP了
pp = minPP;
}
// 删除节点是叶子节点或者仅有一个子节点
Node child; // p的子节点
if (p.left != null) child = p.left;
else if (p.right != null) child = p.right;
else child = null;
if (pp == null) tree = child; // 删除的是根节点
else if (pp.left == p) pp.left = child;
else pp.right = child;
}BST的其他操作
- 除了插入、删除、查找操作之外,二叉查找树中还可以支持快速地查找最大节点和最小节点、前驱节点和后继节点;
- 二叉查找树除了支持上面几个操作之外,还有一个重要的特性,就是中序遍历二叉查找树,可以输出有序的数据序列,时间复杂度是 O(n),非常高效。因此,二叉查找树也叫作二叉排序树;
- 支持重复数据的二叉查找树:
- 很多时候,在二叉查找树中存储的是一个包含很多字段的对象。利用对象的某个字段作为键值来构建二叉查找树。对象中的其他字段叫作卫星数据;
散列表与BST
散列表也支持这些操作,且相比于二叉查找树更高效,时间复杂度是 O(1)。思考这两种数据结构的适用场景。
- 散列表中的数据是无序存储的,如果要输出有序的数据,需要先进行排序。BST中序遍历可以在 O(n) 时间复杂度内输出有序的数据序列;
- 散列表扩容耗时很多,而且当遇到散列冲突时,性能不稳定;尽管二叉查找树的性能不稳定,但是在工程中,最常用的平衡二叉查找树的性能稳定,时间复杂度稳定在 O(logn);
- 尽管散列表的查找等操作的时间复杂度是常量级的,但因为哈希冲突的存在,这个常量不一定比 logn 小,所以实际的查找速度可能不一定比 O(logn) 快。加上哈希函数的耗时,也不一定比平衡二叉查找树的效率高;
- 散列表的构造比二叉查找树要复杂,需要考虑的东西很多。比如散列函数的设计、冲突解决办法、扩容、缩容等。平衡二叉查找树只需要考虑平衡性这一个问题,而且这个问题的解决方案比较成熟、固定;
- 为了避免过多的散列冲突,散列表装载因子不能太大,特别是基于开放寻址法解决冲突的散列表,不然会浪费一定的存储空间;
综合这几点,平衡二叉查找树在某些方面还是优于散列表的,所以,这两者的存在并不冲突。实际的开发过程中,需要结合具体的需求来选择使用哪一个。
存储
链式存储法
顺序存储法
遍历
将所有节点都遍历打印出来。经典的方法有前序遍历、中序遍历和后序遍历。其中,前、中、后序,表示的是节点与它的左右子树节点遍历打印的先后顺序。二叉树的前、中、后序遍历是一个递归的过程。时间复杂度均为O(n);
- 前序遍历:根->左子树->右子树;
- 中序遍历:左子树->根->右子树;
- 后序遍历:左子树->右子树->根;
堆
- 一个完全二叉树;
- 每一个节点的值都必须大于等于(或小于等于)其子树中的每个节点的值;
存储
完全二叉树比较适合用数组来存储。用数组来存储完全二叉树节省存储空间。通过数组的下标,可以找到一个节点的左右子节点和父节点,而不需要存储左右子节点的指针。假设节点在数组中的下标为 i,那么:
- 其父节点的下标为 i/2;
- 其左子节点的下标为 i∗2;
- 其右子节点的下标为 i∗2+1;
操作
插入一个元素和删除堆顶元素。
基于堆实现排序
- 建堆
- 思路1:从前往后处理数组,并且每个数据插入堆中时,都是从下往上堆化;
- 思路2:从后往前处理数组,并且每个数据都是从上往下堆化
- 第二步:排序
- 堆顶跟最后一个元素交换,把下标为n的元素放到堆顶,通过堆化的方法,将剩下的 n - 1 个元素重新构建成堆;
- 堆化完成之后,取堆顶的元素,放到下标是 n - 1 的位置;
- 一直重复这个过程,直到最后堆中只剩下标为 1 的一个元素,排序工作完成
快速排序与堆排序
堆排序数据访问的方式没有快速排序友好
对于快速排序来说,数据是顺序访问的;
对于堆排序来说,数据是跳着访问的;
- 堆排序中,最重要的一个操作就是数据的堆化。对堆顶节点进行堆化,访问数组的元素对应的下标是跳跃的,快速排序则是局部顺序访问。所以,堆排序对 CPU 缓存是不友好的。
同样的数据,在排序过程中,堆排序算法的数据交换次数多于快速排序
- 排序的时候有序度和逆序度两个概念;
- 对于基于比较的排序算法来说,整个排序过程就是由比较和交换(或移动)这两个基本的操作组成的;
- 快速排序数据交换的次数不会比逆序度多,但是堆排序的第一步是建堆,建堆的过程会打乱数据原有的相对先后顺序,导致原数据的有序度降低。比如,对于一组已经有序的数据来说,经过建堆之后,数据反而变得更无序了;
所以,快速排序比堆排序性能好
堆内容小结
- 堆是一种完全二叉树。它最大的特性是:每个节点的值都大于等于(或小于等于)其子树节点的值。因此,堆被分成了两类,大顶堆和小顶堆;
- 堆中比较重要的两个操作是插入一个数据和删除堆顶元素。这两个操作都要用到堆化;
- 插入一个数据的时候,把新插入的数据放到数组的最后,然后从下往上堆化;
- 删除堆顶数据的时候,把数组中的最后一个元素放到堆顶,然后从上往下堆化;
- 这两个操作时间复杂度都是 O(logn);
- 堆排序,堆排序包含两个过程:
- 建堆和排序;
- 建堆:将下标从 n/2 到 1 的节点,依次进行从上到下的堆化操作,就可以将数组中的数据组织成堆这种数据结构;
- 排序:迭代地将堆顶的元素放到堆的末尾,并将堆的大小减一,然后再堆化。重复这个过程,直到堆中只剩下一个元素,整个数组中的数据就都有序排列了;
- 优先级队列是一种特殊的队列,优先级高的数据先出队,不像普通的队列那样,先进先出。实际上,堆就可以看作优先级队列,只是称谓不一样罢了;
- Top K 问题可以分为针对静态数据和针对动态数据,只需要利用一个堆,就可以做到非常高效率的查询 Top K 的数据;
- 求中位数实际上还有很多变形,比如求 99 百分位数据、90 百分位数据等,处理的思路都是一样的,即利用两个堆,一个大顶堆,一个小顶堆,随着数据的动态添加,动态调整两个堆中的数据,最后大顶堆的堆顶元素就是要求的数据;
应用
实现优先级队列
队列最大的特性就是先进先出。在优先级队列中,数据的出队顺序不是先进先出,而是按照优先级来,优先级最高的,最先出队。
实现一个优先级队列的方法有很多,但是用堆来实现是最直接、最高效的。这是因为,堆和优先级队列非常相似。一个堆就可以看作一个优先级队列。很多时候,它们只是概念上的区分而已。往优先级队列中插入一个元素,就相当于往堆中插入一个元素;从优先级队列中取出优先级最高的元素,就相当于取出堆顶元素。
优先级队列的应用场景非常多。很多数据结构和算法都要依赖它。比如,赫夫曼编码、图的最短路径、最小生成树算法等等。很多语言都提供了优先级队列的实现,Java 的 PriorityQueue,C++ 的 priority_queue 等。
合并有序小文件
假设有 100 个小文件,每个文件的大小是 100MB,每个文件中存储的都是有序的字符串。希望将这些 100 个小文件合并成一个有序的大文件。
方法一:整体思路有点像归并排序中的合并函数:
- 从这 100 个文件中,各取第一个字符串,放入数组中,然后比较大小,把最小的字符串放入合并后的大文件中,并从数组中删除;
- 假设,这个最小的字符串来自于 a.txt 这个小文件,就再从这个小文件取下一个字符串,放到数组中,重新比较大小,并且选择最小的放入合并后的大文件,将它从数组中删除;
- 依次类推,直到所有的文件中的数据都放入到大文件为止;
- 这里用数组这种数据结构,来存储从小文件中取出来的字符串。每次从数组中取最小字符串,都需要循环遍历整个数组,显然,这不是很高效。
方法二:优先级队列,也可以说是堆:
- 把小文件中取出来的字符串放入到小顶堆中,堆顶的元素就是优先级队列队首的元素,就是最小的字符串;
- 将这个字符串放入到大文件中,并将其从堆中删除;
- 再从小文件中取出下一个字符串,放入到堆中;
- 循环这个过程,就可以将 100 个小文件中的数据依次放入到大文件中;
- 删除堆顶数据和往堆中插入数据的时间复杂度都是 O(logn),n 表示堆中的数据个数,这里就是 100。该方法比原来数组存储的方式高效;
高性能定时器
假设有一个定时器,定时器中维护了很多定时任务,每个任务都设定了一个要触发执行的时间点。定时器每过一个很小的单位时间(比如 1 秒),就扫描一遍任务,看是否有任务到达设定的执行时间。如果到达了,就拿出来执行。
但是,这样每过 1 秒就扫描一遍任务列表的做法比较低效,主要原因有两点:
- 任务的约定执行时间离当前时间可能还有很久,这样前面很多次扫描其实都是徒劳的;
- 每次都要扫描整个任务列表,如果任务列表很大的话,势必会比较耗时。
针对这些问题,可以用优先级队列来解决:
- 按照任务设定的执行时间,将这些任务存储在优先级队列中,队列首部(也就是小顶堆的堆顶)存储的是最先执行的任务;
- 这样,定时器就不需要每隔 1 秒就扫描遍历任务列表了;
- 取队首任务的执行时间点,与当前时间点相减,得到一个时间间隔 T。这个时间间隔 T 就是,从当前时间开始,需要等待多久,才会有第一个任务需要被执行。这样,定时器就可以设定在 T 秒之后,定时器取优先级队列中队首的任务执行。
- 这样,当前时间点到(T-1)秒这段时间里,定时器都不需要做任何事情;
- 再计算新的队首任务的执行时间点与当前时间点的差值,把这个值作为定时器执行下一个任务需要等待的时间;
- 循环以上操作,定时器既不用间隔 1 秒就轮询一次,也不用遍历整个任务列表,性能就提高了。
针对静态/动态数据集合求Top K
- 针对静态数据集合,也就是说数据集合事先确定,不会再变;
- 在一个包含 n 个数据的数组中,查找前 K 大数据:
- 维护一个大小为 K 的小顶堆,顺序遍历数组,从数组中取出数据与堆顶元素比较:
- 若比堆顶元素大,就把堆顶元素删除,并且将这个元素插入到堆中;
- 若比堆顶元素小,则不做处理,继续遍历数组;
- 遍历数组中的数据,遍历结束后,堆中的数据就是前 K 大数据了。
- 遍历数组需要 O(n) 的时间复杂度,一次堆化操作需要 O(logK) 的时间复杂度,所以最坏情况下,n 个元素都入堆一次,时间复杂度就是 O(nlogK)。
- 维护一个大小为 K 的小顶堆,顺序遍历数组,从数组中取出数据与堆顶元素比较:
- 在一个包含 n 个数据的数组中,查找前 K 大数据:
- 针对动态数据集合,也就是说数据集合事先并不确定,有数据动态地加入到集合中:
- 针对动态数据求得 Top K 就是实时 Top K。一个数据集合中有两个操作,一个是添加数据,另一个询问当前的前 K 大数据:
- 如果每次询问前 K 大数据,都基于当前的数据重新计算的话,那时间复杂度就是 O(nlogK),n 表示当前的数据的大小。
- 实际上,可以一直都维护一个 K 大小的小顶堆,当有数据被添加到集合中时,将其与堆顶的元素对比:
- 若比堆顶元素大,就把堆顶元素删除,并且将这个元素插入到堆中;
- 若比堆顶元素小,则不做处理;
- 这样,无论任何时候需要查询当前的前 K 大数据,都可以立刻将结果返回。
- 针对动态数据求得 Top K 就是实时 Top K。一个数据集合中有两个操作,一个是添加数据,另一个询问当前的前 K 大数据:
热榜 Top10 关键词
处理这个问题,有很多高级的解决方法,比如使用 MapReduce 等。
将处理的场景限定为单机,可以使用的内存为 1GB,该问题的可选解决方案为:
- 用户搜索的关键词,有很多可能都是重复的,所以首先要统计每个搜索关键词出现的频率。可以通过散列表、平衡二叉查找树或者其他一些支持快速查找、插入的数据结构,来记录关键词及其出现的次数;
- 假设选用散列表,可以顺序扫描这 10 亿个搜索关键词。当扫描到某个关键词时,就去散列表中查询:
- 如果存在,将对应的次数加一;
- 如果不存在,将它插入到散列表,并记录次数为 1;
- 遍历完这 10 亿个搜索关键词之后,散列表中就存储了不重复的搜索关键词以及出现的次数;
- 假设选用散列表,可以顺序扫描这 10 亿个搜索关键词。当扫描到某个关键词时,就去散列表中查询:
- 然后,再根据前面讲的用堆求 Top K 的方法,建立一个大小为 10 的小顶堆,遍历散列表,依次取出每个搜索关键词及对应出现的次数,然后与堆顶的搜索关键词对比。如果出现次数比堆顶搜索关键词的次数多,那就删除堆顶的关键词,将这个出现次数更多的关键词加入到堆中;
- 以此类推,当遍历完整个散列表中的搜索关键词之后,堆中的搜索关键词就是出现次数最多的 Top 10 搜索关键词了;
- 上面的解决思路其实存在漏洞。10 亿的关键词还是很多的。假设 10 亿条搜索关键词中不重复的有 1 亿条,如果每个搜索关键词的平均长度是 50 个字节,那存储 1 亿个关键词起码需要 5GB 的内存空间,而散列表因为要避免频繁冲突,不会选择太大的装载因子,所以消耗的内存空间就更多了。而机器只有 1GB 的可用内存空间,所以无法一次性将所有的搜索关键词加入到内存中。
- 在哈希算法那一节讲过,相同数据经过哈希算法得到的哈希值是一样的。可以根据哈希算法的这个特点,将 10 亿条搜索关键词先通过哈希算法分片到 10 个文件中。具体可以这样做:
- 创建 10 个空文件 00,01,02,……,09;
- 遍历这 10 亿个关键词,并且通过某个哈希算法对其求哈希值,然后哈希值同 10 取模,得到的结果就是这个搜索关键词应该被分到的文件编号;
- 对这10亿个关键词分片之后,每个文件都只有 1 亿的关键词,去除掉重复的,可能就只有 1000 万个,每个关键词平均 50 个字节,所以总的大小就是 500MB。1GB 的内存完全可以放得下;
- 针对每个包含 1 亿条搜索关键词的文件,利用散列表和堆,分别求出 Top 10,然后把这个 10 个 Top 10 放在一块,然后取这 100 个关键词中,出现次数最多的 10 个关键词,这就是这 10 亿数据中的 Top 10 最频繁的搜索关键词了;
图
一种非线性表数据结构,比树要复杂
分类
有向图
无向图
带权图
存储
邻接矩阵法
缺点:浪费存储空间
优点:存储方式简单、直接、方便计算
应用:Floyd-Warshall算法
邻接表法
- 查询效率没有邻接矩阵存储方式高;
- 如果链过长,可以将链表转换成其他更高效的数据结构,比如平衡二叉查找树;
- 实际开发中,用红黑树或者其他动态数据结构,比如跳表、散列表等,更加快速地查找两个顶点之间是否存在边;
- 将链表改成有序动态数组,通过二分查找的方法快速定位两个顶点之间是否存在边;
散列表
通过散列函数把元素的键值映射为下标,然后将数据存储在数组中对应下标的位置;
当按照键值查询元素时,可以用同样的散列函数,将键值转化为数组下标,从对应的数组下标的位置取元素;
数组的一种扩展,由数组演化而来。没有数组,就没有散列表。
散列函数
hash(key)(key表示元素的键值,hash(key) 的值表示经过散列函数计算得到的散列值)。
实现
散列函数计算得到的散列值是一个非负整数。
如果 key1 == key2, 那么 hash(key1) == hash(key2)
如果 key1 != key2, 那么 hash(key1) != hash(key2)
设计要点
散列函数的设计不能太过复杂;
散列函数生成的值要尽可能随机并且均匀分布;
装载因子
概念
散列表的装载因子 = 填入表中的元素个数 / 散列表的长度;
- 装填因子越大,说明空闲的位置越少,冲突越多,散列表的性能会下降;
装载因子过大怎么办
- 当装载因子过大时,可以进行动态扩容,重新申请一个更大的散列表,将数据搬移到新散列表中;
- 针对散列表的扩容,数据搬移操作比数组要复杂的多,需要通过散列函数重新计算每个数据的存储位置;
散列冲突
开放寻址法
如果出现散列冲突,就重新探测一个空闲位置,将其插入。
应用
数据量比较小,装载因子小的时候,适合采用开放寻址法。
优点
散列表中的数据都存储在数组中,可以有效地利用 CPU 缓存加快查询速度;
这样实现的散列表,序列化起来比较简单;
缺点
删除数据的时候比较麻烦,需要特殊标记已经删除掉的数据;
装载因子的上限不能太大;
线性探测
往散列表中插入数据时,如果某个数据经过散列函数散列之后,存储位置已经被占用了,就从当前位置开始,依次往后查找,看是否有空闲位置,直到找到为止。
二次探测
和线性探测有共同点:
线性探测每次探测的步长是1,探测的下标序列就是hash(key) + 0,hash(key) + 1,hash(key) + 2,……
二次探测探测的步长就变成了原来的“二次方”,探测的下标序列就是hash(key) + 0,hash(key) + 1^2,hash(key) + 2^2,……
双重散列
先用一组散列表中的第一个散列函数,计算得到的存储位置已经被占用,再用第二个散列函数,依次类推,直到找到空闲的存储位置。
链表法
一种更加常用的散列冲突的解决办法,比开放寻址法简单很多。
每个“桶”(bucket)或者”槽“(slot)会对应一条链表。所有散列值相同的元素都放到相同槽位对应的链表中。
操作
插入时,只需要通过散列函数计算出对应的散列槽位,将其插入到对应的链表中即可;
查找、删除一个元素时,同样通过散列函数计算出对应的槽,遍历链表查找或者删除;
应用
适合存储大对象,大数据量的散列表;
更加灵活、支持更多的优化策略,比如用红黑树代替链表;
散列表的应用
LRU淘汰缓存算法
一个缓存(cache)系统主要包含下面这几个操作:
- 往缓存中添加一个数据;
- 从缓存中删除一个数据;
- 在缓存中查找一个数据。
维护一个按照访问时间从大到小有序排列的链表结构。因为缓存大小有限,当缓存空间不够,需要淘汰一个数据的时候,直接将链表头部的结点删除。
当要缓存某个数据的时候,先在链表中查找这个数据:
- 如果没有找到,直接将数据放到链表的尾部;
- 如果找到了,把它移动到链表的尾部;
- 因为查找数据需要遍历链表,所以单纯用链表实现的 LRU 缓存淘汰算法的时间复杂很高,是 O(n)。
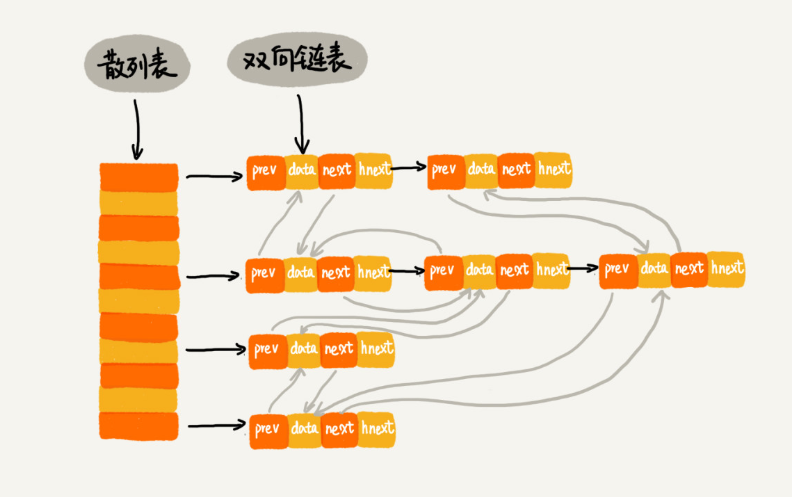
如果将散列表和链表两种数据结构组合使用,可以将这三个操作的时间复杂度都降低到 O(1)。
pre和next组成双向链表,这个链表是按照缓存的时间由大到小,组成的一个缓存队列;
hnext(使用链表法解决冲突的散列表中的链表的next指针)的作用是,(当发生哈希冲突时)在链表中插入缓存数据时,用于哈希值相等的缓存数据的连接。
散列表和链表经常一块使用。散列表虽然支持非常高效的数据插入、删除、查找操作,但是散列表中的数据都是通过散列函数打乱之后无规律存储的。
它无法支持按照某种顺序快速地遍历数据。如果希望按照顺序遍历散列表中的数据,需要将散列表中的数据拷贝到数组中,然后排序,再遍历。因为散列表是动态数据结构,不停地有数据的插入、删除,所以按序遍历散列表中的数据的时候,需要先排序,效率很低。为了解决这个问题,将散列表和链表(或者跳表)结合在一起使用。
Word 拼写检查实现
常用的英文单词有 20 万个左右,假设单词的平均长度是 10 个字母,平均一个单词占用 10 个字节的内存空间,那 20 万英文单词大约占 2MB 的存储空间,就算放大 10 倍也就是 20MB。
这个大小完全可以放在内存里面。所以可以用散列表来存储整个英文单词词典。当用户输入某个英文单词时,拿用户输入的单词去散列表中查找。如果查到,则说明拼写正确;如果没有查到,则说明拼写可能有误,给予提示。借助散列表这种数据结构,就可以轻松实现快速判断是否存在拼写错误。
工业级散列表特性
支持快速的查询、插入、删除操作;
内存占用合理,不能浪费过多的内存空间;
性能稳定,极度情况下,散列表的性能也不会退化到无法接受的情况;
实现工业级散列表要点
设计一个合适的散列表;
定义装载因子的阈值,并且设计动态扩容策略;
选择合适的散列冲突解决方法;
哈希算法
将任意长度的二进制值串映射为固定长度的二进制值串,这个映射的规则就是哈希算法;
通过原始数据映射之后得到的二进制值串就是哈希值;
设计步骤
从哈希值不能反向导出原始数据;
堆输入数据非常敏感,哪怕原始数据只修改了一个bit,最后得到的哈希值也大不相同;
散列冲突的概率要很小,对于不同的原始数据,哈希值相同的概率非常小;
哈希算法的执行效率要尽量高效,针对较长的文本,也能快速计算出哈希值;
应用
安全加密
唯一标识
数据校验
散列函数
负载均衡
数据分片
分布式存储
位图
一种特殊的散列表;
通过数组下标来定位数据,访问效率非常高;
每个数字用一个二进制位来表示,数字范围不大的情况下,需要的内存空间非常节省;
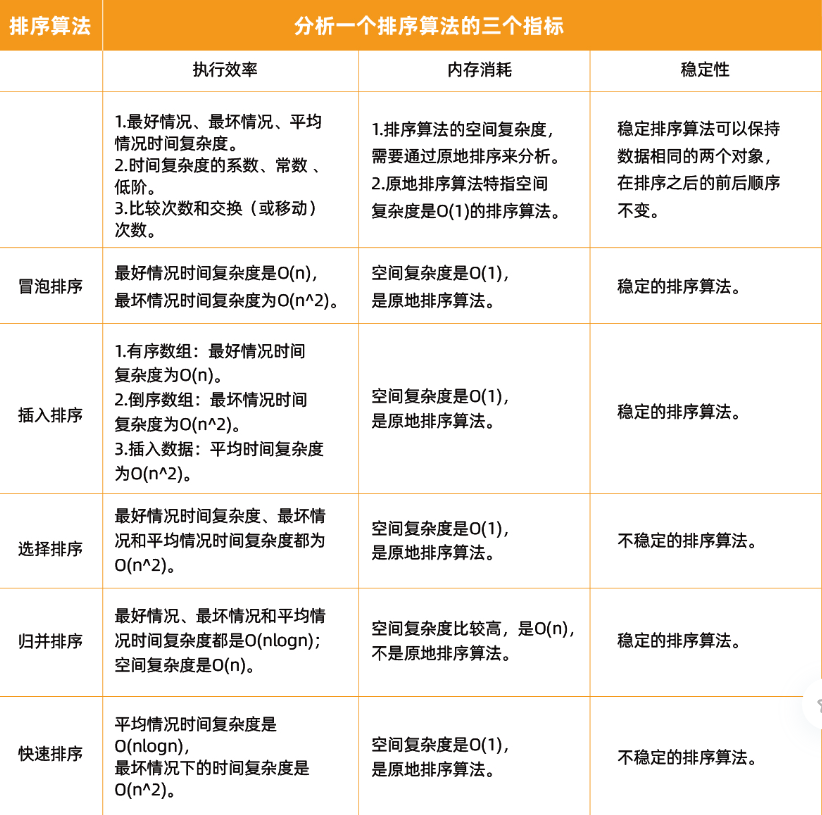
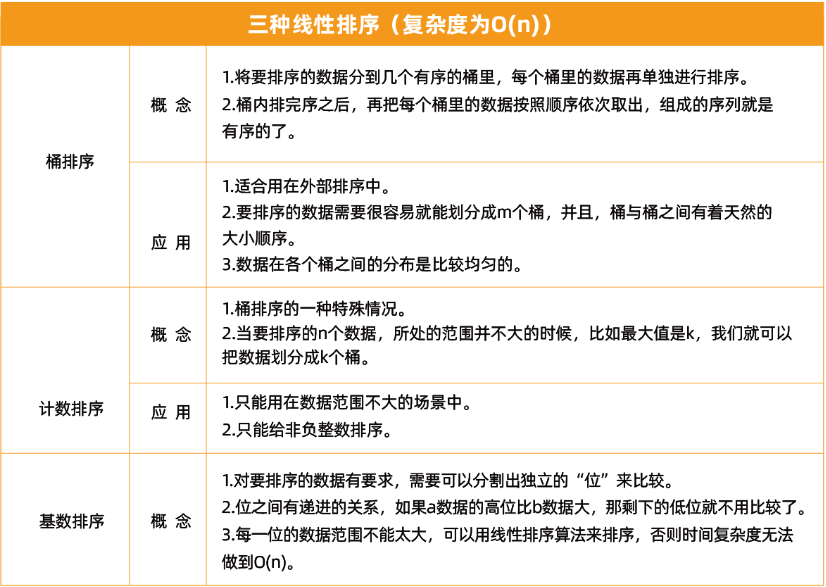
排序算法
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!